

Επεισοδιακά έγινε η επανεκκίνηση της σεζόν μετά το καλοκαιρινό διάλειμμα, τουλάχιστον για την FP1 που επικράτησε ο Zarco παρά την πτώση ενώ ο Quartararo αντιμετώπισε μηχανικά προβλήματα που προφανώς και τα ξεπέρασε πριν την FP2 στην οποία ήταν ταχύτερος.
Ηλιόλουστες οι συνθήκες αλλά με αέρα που δεν δυσκόλεψαν τον Zarco ο οποίος έθεσε τον ρυθμό από την πρώτη στιγμή με 2’03.905.
Αμέσως μετά ο Quartararo πέρασε στην αντεπίθεση μειώνοντας οριακά τον χρόνο και ταυτόχρονα μελετώντας την διαδρομή του μακρύτερου γύρου που θα πρέπει να ακολουθήσει μετά από όλα όσα έγιναν στον Assen. Παραπονέθηκε πως με τις συνθήκες της πίστας θα χάσει στην συγκεκριμένη περίπτωση πολύ περισσότερο χρόνο, κι ένα δίκιο το έχει.
Βέβαια εκείνη την στιγμή είχε άλλο πρόβλημα καθώς αντιμετώπιζε μηχανικά προβλήματα τα οποία προσπέρασε αλλάζοντας το ρεζερβουάρ. Ο Zarco όμως παρόλο που έπεσε κράτησε τον ταχύτερο χρόνο βελτιώνοντας συνεχώς και έφτασε ταχύτερος και του Bagnaia.
Στην FP2 ο Zarco συνέχισε να είναι εξαιρετικά γρήγορος, όχι όμως σαν τον Mir που αντίστοιχα ήταν εξαιρετικός στην FP1 και κρατούσε τώρα τον χρόνο του Zarco ωστόσο κανείς δεν μπορούσε να φτάσει το 1.58 ψηλό που έκανε ο Quartararo στο τέλος.

Στο μεταξύ ο Γάλλος πέρασε σχεδόν όλο του τον χρόνο ψάχνοντας να βρει την καλύτερη έξοδο από τον μακρύτερο γύρο και θα μπορούσε να βελτιώσει ακόμη περισσότερο τον χρόνο του, αν δεν επέλεγε να αναλωθεί σε αυτό. Προφανώς και ακολουθεί μία σωστή στρατηγική καθώς θα πρέπει να εκτελέσει νωρίς την ποινή του και θέλει να είναι σίγουρος πως εκείνη την στιγμή θα μπορεί να χάσει το λιγότερο δυνατό σε χρόνο.
Ο Binder της Yamaha και ο Miller ήταν υπεύθυνοι με δύο πτώσεις για κίτρινες σημαίες που ακύρωσαν προσπάθειες. Εντυπωσίασε ο Vinales που κατάφερε στην FP2 να είναι ταχύτερος του Zarco αλλά και του Aleix Espargaro με τον Mir να κάνει τελικά τον δεύτερο χρόνο.
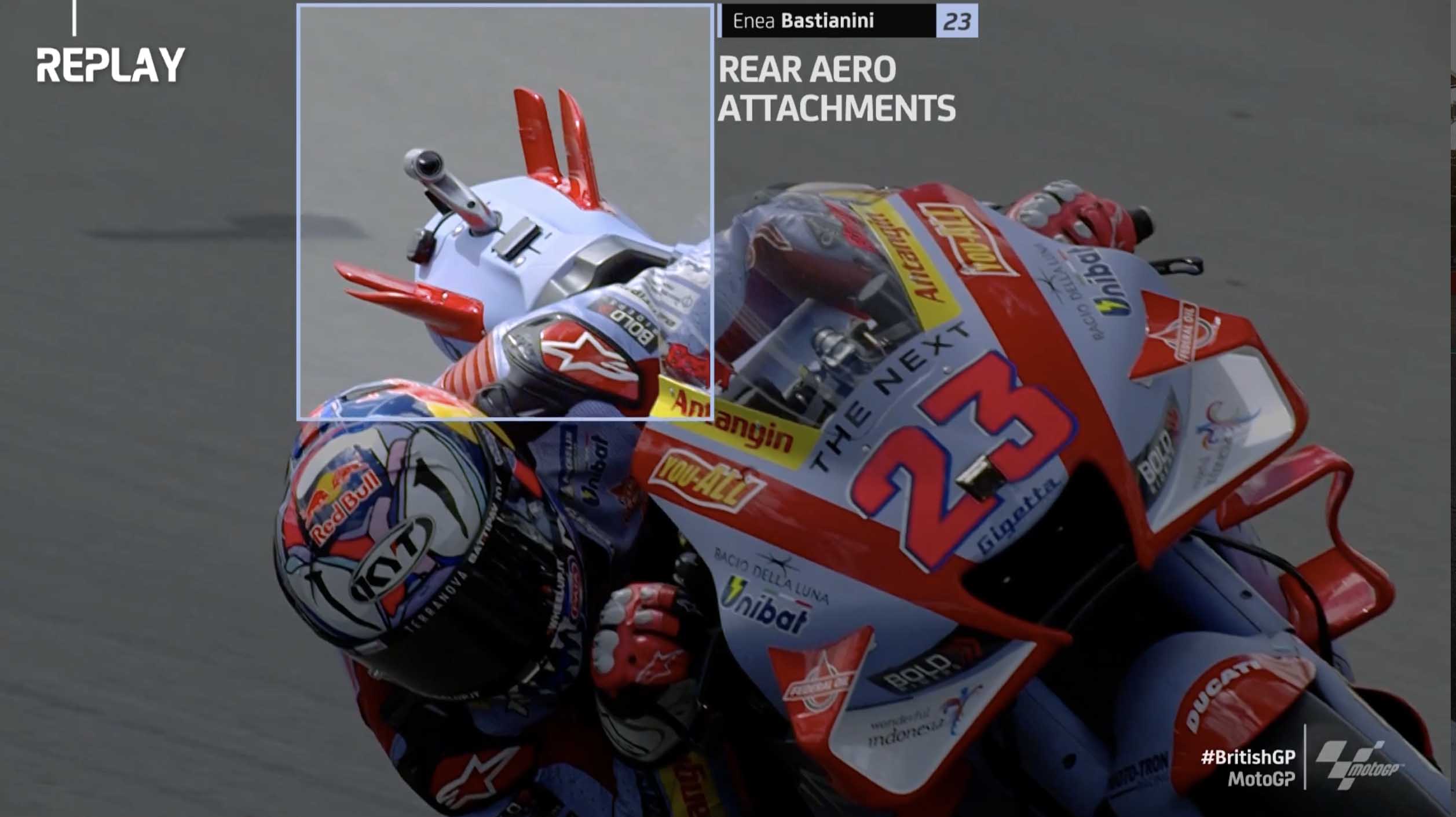
Εντυπωσίασε και η Ducati όταν στο τέλος της FP2 ο Bastianini με τον Martin βγήκαν να δοκιμάσουν νέα αεροδυναμικά στην ουρά που θυμίζουν τον αμυντικό μηχανισμό δεινόσαυρου και ξεκίνησαν την διαμάχη για το κατά πόσο ακολουθούν τους κανόνες. Μεταξύ τους μάλιστα υπήρχαν διαφορές και είναι ξεκάθαρο πως η Ducati εκμεταλλεύτηκε την FP2 για να κάνει μετρήσεις με τον Martin να λέει πως κέρδισε σε τελική αλλά έχασε σε ευελιξία και θα περίμενε κανείς πως η Ducati θα στόχευε διαμετρικά αντίθετα…
Αλλαγές υπήρχαν και εμπρός και στο φαίρινγκ συνολικά όπως εξήγησε ο ίδιος, αλλά το βασικό που είδε το κοινό, ήταν η… ουρά του Στεγόσαυρου. Αύριο θα γίνου εκ νέου δοκιμές από την Ducati ώστε να έχει μία πιο σαφή εικόνα για τα ευεργετήματα των συγκεκριμένων αεροδυναμικών, αν και σύμφωνα με τον Bastianini ο στόχος είναι το φρενάρισμα και εκεί πράγματι υπάρχει διαφορά.
Αποτελέσματα FP1 | ||||
Θέση | Αναβάτης | ΜΟΤΟ | Χρόνος | Διαφ. |
1 | Johann Zarco | Ducati | 1:59.893 |
|
2 | Francesco Bagnaia | Ducati | 1:59.920 | 0.027 |
3 | Alex Rins | Suzuki | 2:00.220 | 0.327 |
4 | Fabio Quartararo | Yamaha | 2:00.438 | 0.545 |
5 | Takaaki Nakagami | Honda | 2:00.448 | 0.555 |
6 | Aleix Espargaro | Aprilia | 2:00.630 | 0.737 |
7 | Maverick Viñales | Aprilia | 2:00.799 | 0.906 |
8 | Joan Mir | Suzuki | 2:00.843 | 0.950 |
9 | Jorge Martin | Ducati | 2:00.948 | 1.055 |
10 | Brad Binder | KTM | 2:00.994 | 1.101 |
11 | Pol Espargaro | Honda | 2:01.040 | 1.147 |
12 | Jack Miller | Ducati | 2:01.055 | 1.162 |
13 | Marco Bezzecchi | Ducati | 2:01.112 | 1.219 |
14 | Miguel Oliveira | KTM | 2:01.120 | 1.227 |
15 | Alex Marquez | Honda | 2:01.174 | 1.281 |
16 | Enea Bastianini | Ducati | 2:01.219 | 1.326 |
17 | Remy Gardner | KTM | 2:01.539 | 1.646 |
18 | Raul Fernandez | KTM | 2:01.578 | 1.685 |
19 | Luca Marini | Ducati | 2:01.607 | 1.714 |
20 | Andrea Dovizioso | Yamaha | 2:01.748 | 1.855 |
21 | Franco Morbidelli | Yamaha | 2:01.775 | 1.882 |
22 | Stefan Bradl | Honda | 2:02.062 | 2.169 |
23 | Fabio Di Giannantonio | Ducati | 2:02.179 | 2.286 |
24 | Darryn Binder | Yamaha | 2:02.565 | 2.672 |
Αποτελέσματα FP2 | ||||
1 | Fabio Quartararo | Yamaha | 1:58.946 |
|
2 | Joan Mir | Suzuki | 1:59.100 | 0.154 |
3 | Maverick Viñales | Aprilia | 1:59.123 | 0.177 |
4 | Johann Zarco | Ducati | 1:59.134 | 0.188 |
5 | Aleix Espargaro | Aprilia | 1:59.153 | 0.207 |
6 | Miguel Oliveira | KTM | 1:59.163 | 0.217 |
7 | Alex Rins | Suzuki | 1:59.246 | 0.300 |
8 | Enea Bastianini | Ducati | 1:59.358 | 0.412 |
9 | Jack Miller | Ducati | 1:59.364 | 0.418 |
10 | Marco Bezzecchi | Ducati | 1:59.378 | 0.432 |
11 | Francesco Bagnaia | Ducati | 1:59.385 | 0.439 |
12 | Luca Marini | Ducati | 1:59.396 | 0.450 |
13 | Jorge Martin | Ducati | 1:59.657 | 0.711 |
14 | Alex Marquez | Honda | 1:59.789 | 0.843 |
15 | Stefan Bradl | Honda | 1:59.801 | 0.855 |
16 | Pol Espargaro | Honda | 1:59.852 | 0.906 |
17 | Fabio Di Giannantonio | Ducati | 1:59.986 | 1.040 |
18 | Takaaki Nakagami | Honda | 2:00.003 | 1.057 |
19 | Andrea Dovizioso | Yamaha | 2:00.043 | 1.097 |
20 | Franco Morbidelli | Yamaha | 2:00.138 | 1.192 |
21 | Brad Binder | KTM | 2:00.144 | 1.198 |
22 | Remy Gardner | KTM | 2:00.154 | 1.208 |
23 | Darryn Binder | Yamaha | 2:01.528 | 2.582 |
24 | Raul Fernandez | KTM | 2:02.062 | 3.116 |











